Nota: 8,5
Devemos perde 1,5 por conta de não termos conseguido atingir nossos objetivos nas competições como no Eletroímã e o Robô Gladiador, mesmo o grupo se esforçando, tentando fazer o seu melhor, não foi o suficiente para termos um bom resultado, pois tivemos algumas dificuldades nas construções.E também pelo fato de no 3º trimestre não estarmos em uma colocação boa, como sempre tivermos, porém o grupo ainda continua se esforçando, para melhorar e conseguir uma colocação melhor.

"Deixem que o futuro diga a verdade e avalie cada um de acordo com o seu trabalho e realizações. O presente pertence a eles, mas o futuro pelo qual eu sempre trabalhei pertence a mim." -Nikola Tesla
terça-feira, 1 de novembro de 2011
sábado, 29 de outubro de 2011
Relatório - Robô Gladiador
Nome | Número | Série e Turma |
Bruna Marcondes | 06 | 3ºD |
Felipe Migotto | 11 | 3ºD |
Fernanda Rocha | 12 | 3ºD |
Jennyfer Martins | 15 | 3ºD |
Luís Gustavo | 19 | 3ºD |
Objetivo do Trabalho: Construir um robô gladiador. Cumprir uma prova mínima, sendo estourar duas bexigas posicionadas opostamente. Aprender na prática o que aprendemos na teoria, como eletricidade e circuitos elétricos. |
Descreva as funções de cada elemento do grupo: O grupo dividiu o trabalho da seguinte forma:
|
Descrever todos os materiais adquiridos e utilizados na construção do robô, juntamente com seus respectivos valores (no final de o total do gastos)
|
Descreva seu projeto e desenhe o mesmo neste local, colocando todas as suas dimensões. Nosso projeto foi baseado no projeto do Fernando Bettoni, o qual é divulgado no site: http://www.idesa.com.br/disciplinas/fisica/download/robo_gladiador.pdf explicando passo a passo a construção do robô gladiador. O robô ficou desta maneira, como segue a foto abaixo:  |
Faça uma pesquisa sobre robôs (início, inventor, aplicações, onde se utiliza, etc). A História dos robôs Os robôs estão presentes desde os tempos mais remotos da civilização. Já na Grécia Antiga existiam aparelhos, não tão modernos e avançados como hoje, porém com funcionamento através de pesos e funções pneumáticas que os possibilitava movimentar sozinhos. Leonardo da Vinci (1452-1519), na renascença, com seu amplo conhecimento do corpo humano, desenhou e desenvolveu modelos de bonecos que moviam mãos, pernas e alguns eram até mesmo capazes de escrever ou tocar instrumentos musicais . Esta tecnologia deixada foi base para as primeiras máquinas automáticas desenvolvidas na I Revolução Industrial. Deste momento por diante o que ocorreu foi uma evolução notória. Em 1738, foi criado o primeiro robô por Jacques de Voucanson, o qual fez um andróide que tocava flauta, algumas palavras de Voucanson ao apresentar sua invenção: "homem de altura natural, vestido à pastor provençal, tocando 20 melodias diferentes na flauta provençal (também chamada galoubet) numa mão e o tamborim na outra, com toda a precisão e perfeição, como um tocador hábil". Após décadas outro inventor se destacou: Nikola Tesla (1856-1943) o qual estudava não apenas máquinas controladas à distância, mas também, segundo o pesquisador, “[...] máquinas dotadas de sua própria inteligência. Como o período da evolução avançou, penso também que não está longe o tempo em que mostrarei uma automação que, deixada por si, irá agir como dotada de razão e sem qualquer controle voluntário do exterior”. Entretanto, o nome robô não era utilizado, este termo é de origem checa robota que significa trabalhador que realiza trabalho forçado, inventada pelo escritor Korel Capek (1890-1938) o qual escreveu uma peça de teatro conhecida como R.U.R (Rossum´s Universal Robots – Robôs Universais de Rossum), no qual um gênio desenvolve uma substância especial e começa a construir humanoides (robotas) para substituir o homem no desempenho de tarefas físicas, foi então que o termo robô começou a se espalhar. Os robôs foram protagonistas de filmes, histórias e séries, contudo não são apenas ficcionalmente que as máquinas fazem parte da vida cotidiana, atualmente os robôs são muito utilizados em várias funções em fábricas, lojas e outros estabelecimentos. O primeiro robô industrial foi o Unimates – desenvolvido por George Devol e Joe Engleberger para a General Motors – em 1961  Em nome da ciência  Robôs são muito utilizados em diversos campos da pesquisa científica. Em alguns casos – como a exploração espacial – por exigir menos cuidados e apresentar menos exigências do que um humano. O Sojourner foi enviado a Marte para recolher – durante mais de um mês terrestre – informações e imagens sobre o planeta vermelho. Dispositivos semelhantes são usados para a exploração de vulcões e de outros ambientes inóspitos na Terra. Recentemente o diretor de cinema James Cameron (Titanic, 1997) em 2003 voltou ao local do trágico naufrágio, desta vez com robôs – cada um custando aproximadamente US$ 1 milhão – para filmar Ghosts of the Abyss, um documentário em 3-D sobre o navio inglês. Outro campo de pesquisa que tem se desenvolvido muito é o da robótica social, que pretende descobrir o impacto que a convivência com robôs pode ter sobre os indivíduos e principalmente sobre a sociedade como um todo. As pesquisas nessa área se iniciaram com Grey Walter e se desenvolveram ainda mais com o surgimento das primeiras inteligências artificiais no começo da década de 1990. É nessa área que as Três Leis postuladas por Asimov em Eu, robô atravessam a fronteira da ficção para a realidade, como um dos testes – no caso, como verificação de comportamento – para a definição de robô social. O outro teste necessário é o teste de Turing, que define a capacidade de inteligência do robô. Existem algumas discordâncias sobre a utilização de apenas estes testes, já que ambos excluem as interações entre dois ou mais robôs, considerando apenas válidos os resultados obtidos a partir da interação homem-robô. Robôs e medicina "Problemas cardíacos, cerebrais e urológicos são tratados com ajuda de braços robóticos, que levam câmeras e instrumentos para dentro do paciente" - Gazeta do povo (07/02/2011) A tecnologia associada à medicina formam uma dupla espetacular, os benefícios que os robôs trazem à saúde com equipamentos que permitem uma visão ampliada em até 15 vezes e com imagens em três dimensões do local da cirurgia facilitam o trabalho e evitam erros médicos. “Desvantagens: A cirurgia realizada com tecnologia robótica, além do alto custo, não oferece a sensação tátil para o cirurgião. “Você não consegue pegar o tecido e saber o que ocorre. Por outro lado, tem a visão ampliada e melhorada, que compensa esta perda”, diz o cirurgião Sérgio Arap.” |
Faça uma tabela de problemas e soluções que ocorreram no desenvolvimento do robô gladiador.
|
Teste seu robô e descreva os resultados abaixo (teste oito de frente, oito de ré e estourar bexiga estática). Na descrição do teste coloque o tempo que você leva para executar cada tarefa. O robô apresentou alguns problemas, o qual o grupo tentou solucionar, porém não conseguiu, com isso não conseguindo realizar tais testes. Após solucionar o problema, iremos realizar os testes e mostrar os resultados. |
Cite 5 conceitos físicos e descreva em que momento ele se faz presente no projeto do robô gladiador. Atrito: as rodas fazendo atrito com o chão, sendo uma força que age quando um objeto encontra-se em movimento em contato com outro. Corrente elétrica: ocorre por conta do fio do motor que está ligado a chave. Aceleração: ocorre quando o robô se movimenta em qualquer sentido. Energia cinética: sendo a quantidade de trabalho que o robô realizou para modificar sua velocidade. Potência: o trabalho que o robô exerceu por unidade de tempo |
Utilizando seus conhecimentos de Física determine a potência de seu robô gladiador. |
Conclusão. Concluímos que faltam alguns detalhes para a melhoria do nosso robô. Na parte de construir sentimos certa dificuldade em fixar o eixo na roda e também na parte elétrica, com isso o grupo não conseguiu cumprir a prova mínima, mas com muito esforço de todos do grupo iremos tentar solucionar devidos problemas. Usando os conceitos de física, atrito, aceleração, energia cinética, entre outros. Com o objetivo de construir um robô gladiador, cumprir a prova mínima e aprender na prática sobre os conceitos de eletricidade e circuitos elétricos. Com este projeto, aprendemos mais sobre a Física "brincando" e se "divertindo", apesar das dificuldades encontradas na construção. Com base no projeto do Fernando Bettoni e das orientações dadas por ele e pelo Professor Maurício construímos o nosso robô. Utilizando os materiais citados no item 3, e com a descrição do projeto encontrada no item |
domingo, 16 de outubro de 2011
Magnetismo
Corrente elétrica gera campo magnético
Fio reto e longo (condutor retilíneo)

Vetor -> Simbologia

Sabendo que:
B -> campo magnético
i -> intensidade de C.E.
R -> distância do fio ao ponto onde o campo será medido
B -> campo magnético
i -> intensidade de C.E.
R -> distância do fio ao ponto onde o campo será medido
 -> permeabilidade magnética
-> permeabilidade magnéticaComo calcular o B :

Direção e sentido -> regra da mão direita

Polegar -> i
outros dedos -> B

Espira circular

Como calcular ?
R -> o raio da espira
Direção e sentido -> regra da mão direita
R -> o raio da espira
Direção e sentido -> regra da mão direita

Solenóide

Como calcular ?
l -> comprimento do solenóide
n -> número de espiras
l -> comprimento do solenóide
n -> número de espiras

Referências :http://www.brasilescola.com/upload/e/fig2(2).jpg

.jpg){kind=link}
Resistência elétrica
R -> resistência elétrica
i -> corrente elétrica
V -> d.d.p ou tensão elétrica
no SI :
R -> Ω
i -> A
V -> V
i -> corrente elétrica
V -> d.d.p ou tensão elétrica
no SI :
R -> Ω
i -> A
V -> V
sexta-feira, 30 de setembro de 2011
Funções dos integrantes para o Robô Gladiador
Bruna Marcondes: Responsável pelo relatório
Felipe Migotto: Responsável pela construção do robô e pesquisa
Fernanda Rocha: Responsável pelo relatório
Jennyfer Martins: Responsável pelo relatório e postagem no blog
Luís Gustavo: Responsável pela construção do robô e pesquisa.
Felipe Migotto: Responsável pela construção do robô e pesquisa
Fernanda Rocha: Responsável pelo relatório
Jennyfer Martins: Responsável pelo relatório e postagem no blog
Luís Gustavo: Responsável pela construção do robô e pesquisa.
domingo, 4 de setembro de 2011
Mini Biografia
D. Pedro II

Pedro de Alcântara João Carlos Leopoldo Salvador Bibiano Francisco Xavier de Paula Miguel Gabriel Rafael Gonzaga nasceu em 2 de dezembro de 1825, na cidade do Rio de Janeiro, faleceu em 5 de dezembro de 1892, em Paris.
Foi o segundo imperador do Brasil, filho de D. Pedro I e Maria Leopoldina que faleceu quando Dom Pedro II tinha apenas 1 ano de idade. Era o terceiro filho homem do casal real, mas devido a morte de seus irmãos mais velhos, tornou-se o herdeiro do trono.
Após a abdicação de seu pais ao trono brasileiro, ascendeu como imperador aos 6 anos de idade, em 7 de abril de 1831. Como era muito jovem, ficou sob a tutela de José Bonifácio de Andrade e Silva e de Manuel Inácio de Andrade Souto Maior, marquês de Itanhaém.
Até atingir a maioridade (leia: Golpe da Maioridade), o Brasil foi governado por uma regência, estudou com a sua camareira (condessa de Belmonte), com mestres de diversas áreas , aprendendo outros idiomas, artes e conhecimentos científicos.
Em virtude de questões políticas no Brasil, Dom Pedro II assumiu o trono em 18 de julho de 1841, na Capela Imperial do Rio de Janeiro. Em 1843, casou-se com a princesa Teresa Cristina de Bourbon, tendo quatro filhos, sendo as princesas Isabel e Leopoldina as únicas que sobreviveram.
Era muito interessado em ciências e inovações, e como imperador construiu as primeiras linhas telegráficas e a primeira estrada de ferro do país. Durante seu Império ocorreu o fim do tráfico negreiroem 4 de setembro de 1850, a Lei do Ventre Livre de 28 de setembro de 1871, e a libertação dos escravos pela Lei dos Sexagenários e da Lei Áurea, em 13 de maio de 1888.
Após a Proclamação da República em 15 de novembro de 1889, ficou no paço da Cidade como prisioneiro, recebendo intimação para deixar o Brasil em 24 horas. Foi para Portugal com toda a família, sua esposa faleceu no Porto em 28 de dezembro do mesmo ano.
No continente europeu viveu em Cannes, Versalhes e Paris. Trabalhou em palestras, conferências e atividades artísticas. Faleceu aos 66 anos de idade de pneumonia num hotel de Paris.
Para saber mais sobre a vida de D.Pedro II :
http://pt.wikipedia.org/wiki/Pedro_II_do_Brasil
Fonte: http://www.historiabrasileira.com/biografias/dom-pedro-ii/
Circuitos elétricos
Pág 35.
1- No circuito, o amperímetro A e o voltímetro V são ideais.Sendo E=20 V, R1 = 8Ω, R2=6Ω, R3= 2Ω e R4=1 Ω. Calcule as leituras em V e em A.


A= 0 AV=15V
Com a chave fechada:
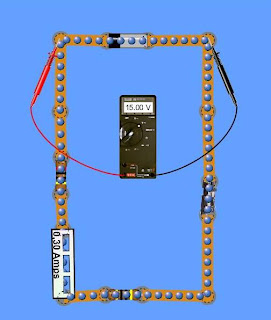
A= 0,3 A
V= 15V
1- No circuito, o amperímetro A e o voltímetro V são ideais.Sendo E=20 V, R1 = 8Ω, R2=6Ω, R3= 2Ω e R4=1 Ω. Calcule as leituras em V e em A.

V= 4V (calculando o voltímetro)
2-No circuito da figura, os medidores são ideais, e a chave ch está aberta. Determine as leituras no amperímetro A e no voltímetro V.

A= 0 AV=15V
Com a chave fechada:
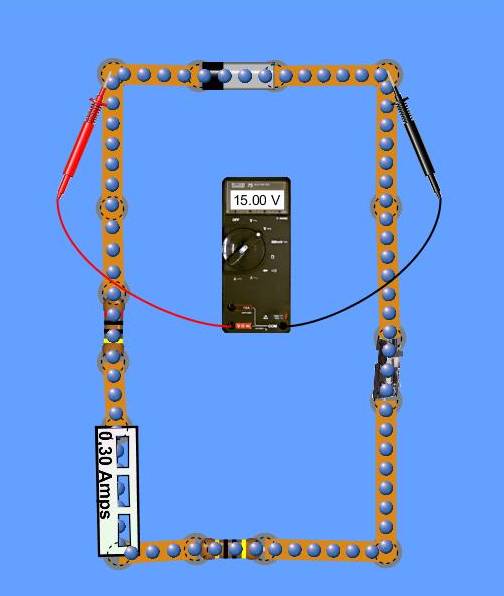
A= 0,3 A
V= 15V
sexta-feira, 1 de julho de 2011
Correção do Relatório (Telefone de latinha)
1>Objetivo do Trabalho:
-Construir um telefone de latinha (podendo ser lata ou copos descartáveis), utilizando no mínimo 10 metros de algum fio.
-Passar 20 palavras em 1 minuto
-Aprender na prática o conceito de ondas e acústica.
11> Faça uma descrição longa utilizando conceitos de acústica para descrever o projeto;
Para ter um bom desempenho no telefone de latinha é necessário conhecer as ondas sonoras e acústica, pondo em prática o melhor. Se caso escolher o material errado, as vibrações da corda iram dificultar a interpretação do integrante que está a escuta.
O nosso telefone teve um bom desempenho na voz feminina, a voz do integrante escolhido pode haver mudanças no resultado, cada projeto fica bom com uma certa voz.Outro caso que pode interferir no resultado, é não deixar o fio bem esticado ou então colocar o dedo no fio, pois isso impede que as ondas sonoras percorram para a outra pessoa.
A voz da pessoa, produz ondas sonoras, que dentro do copo faz ocorrer a vibração . A vibração que ocorre é conduzida pelo barbante até a outra pessoa, onde ocorre uma vibração semelhante no outro copo, a qual permite á pessoa do outro lado entender, e escutar o que se fala.
Os conceitos de acústica que ocorre no telefone de latinha são:
Intensidade: permite-nos apontar um som forte de um som fraco, dependendo da intensidade da vibração, quando maior a intensidade mais forte é o som e vice versa.
A intensidade existe de duas maneiras;
· Intensidade Física ou Energética – Chamada de limiar de audibilidade, é a intensidade das ondas acústicas.
· Intensidade Fisiológica ou Nível Sonoro – Grandeza física capaz de calcular a intensidade do som. A grandeza é medida em Bel cujo submúltiplo é o decibel.
Altura: mesmo sem conhecer música, conseguimos diferenciar o som agudo (ou fino), do som grave (ou grosso), a altura serve para diferenciarmos os mesmos. A altura do som depende da freqüência, que é o número de vibrações por segundo. Quanto maior a freqüência mais aguda é o som e vice versa.
Timbre: cada pessoa tem o seu timbre, não existem timbres iguais. Através do timbre podemos diferenciar o som de um instrumento, mesmo sem ver qual o instrumento está sendo utilizado. Isto é, o timbre é uma qualidade que nos permite compreender a diferença entre dois sons da mesma altura e intensidade.
• Som fundamental: quando se percebe a presença de sons tocados numa mesma altura, porém por instrumentos diferentes.
• Sons harmônicos: sons que completam o som fundamental formando o timbre.
• Sons harmônicos: sons que completam o som fundamental formando o timbre.
sexta-feira, 24 de junho de 2011
Relatório: Telefone de latinha
Iniciação Tecnológica- Telefone de Latinha -Grupo 4 | NOTA |
1ª Parte
Nome | Número | Série e Turma |
Bruna Marcondes | 06 | 3ºD |
Felipe Migotto | 11 | 3ºD |
Fernanda Rocha | 12 | 3ºD |
Jennyfer Martins | 15 | 3ºD |
Luís Gustavo | 19 | 3ºD |
1>Objetivo do Trabalho: -Construir um telefone de latinha (podendo ser lata ou copos descartáveis), utilizando no mínimo -Passar o maior número de palavras para o outro integrante. -Aprender na prática o conceito de ondas e acústica. |
2>Descrever os Materiais Utilizados na construção do Telefone. (Todos os Materiais) - 2 copos plásticos - 1 lata de Nescau - 1 lata de milho - agulha - tesoura - fita métrica |
3>Descreva em 7 passos a construção do telefone.      |
4>Desenhe o Telefone com as duas pessoas e indique os fenômenos ondulatórios que ocorrem. Classifique de forma completa a onda existente.  -Mecânica-Longitudinal-Unidimensional Dispersão: A Dispersão é um fenômeno que acontece quando uma onda, resultante da superposição de várias outras entra num meio onde a velocidade de propagação seja diferente para cada uma de suas componentes. Conseqüentemente a forma da função de onda inicial muda, sendo que sua forma é uma função do tempoDifração:É o encurvamento sofrido por uma onda quando esta encontra obstáculos à sua propagação. Esta propriedade das ondas foi de fundamental importância para provar que os raios de uma onda não são retilíneos.Interferência:Interferência representa a superposição de duas ou mais ondas num mesmo ponto. Esta superposição pode ter um caráter de aniquilação, quando as fases não são as mesmas (interferência destrutiva) ou pode ter um caráter de reforço quando as fases combinam (interferência construtiva). |
2ª Parte
5> Quantos projetos foram feitos antes do definitivo: (Faça um histórico dos mesmos) (No caso de ser a primeiro e único, Justifique o porquê de não ter tentado uma evolução no projeto) Foram feitos 3 projetos. 1º projeto: Lata de Nescau, lata de milho, com fio de barbante. 2º projeto: 2 copos plásticos, com linha de costura 3º projeto: 2 copos plásticos, com linha de pipa. O 2º e 3º projeto por serem linhas muito finas, a linha enrolava toda hora, com isso decidimos mudar para o barbante. |
6> Crie uma lista de problemas ocorridos no telefone e a solução que o grupo utilizou para o mesmo (Faça em forma de tabela com duas colunas).
|
3ª Parte (na escola)
7> Para o telefone determine algumas grandezas físicas.
Massa da cordinha | Comprimento | Densidade linear | Dimensão da abertura da latinha |
5g | 10m | 0,5g/m | 7,5cm |
Comprimento de onda da voz do aluno escolhido | Freqüência do som emitido pelo aluno | Velocidade do som na cordinha | Número de palavras por minuto |
1,7m | 200 - 400 Hz | X | 21 |
8> Faça 9 testes com o telefone, e anote na tabela observações pertinentes:
Fio | L | Observações |
Nylon | Uma grande dificuldade de interpretação | |
Melhoro, em relação do de | ||
A voz ficava muito baixa | ||
Houve possibilidade de comunicação | ||
Barbante | Fácil interpretação da fala | |
Fácil interpretação da fala | ||
Linha de costura | Houve problema com certas palavras, mais foi possível a comunicação | |
Fácil interpretação da fala | ||
Fácil interpretação da fala |
9> Utilize este espaço para outros comentários de resultados do item anterior: Tanto com o barbante ou com a linha de costura, conseguimos ter uma boa comunicação, era possível se comunicar .No primeiro teste ocorrido na escola, utilizamos a linha de costura, e o resultado foi razoável. Mas por ser muito fino, embaralhava várias vezes, e acabamos mudando para o barbante, e tivemos um bom resultado com ele também. Com o nylon, percebemos que a uma grande dificuldade, não é possível ter comunicação. |
4ª Parte (na escola)
10> Utilize o espaço para colocar as contas do item 7.
massa/comprimento : 5 = 0,5g/m 10
Velocidade do som = 340 = 1,7m Frequência do som 200 |
11> Faça uma descrição longa utilizando conceitos de acústica para descrever o projeto; Intensidade: permite-nos apontar um som forte de um som fraco, dependendo da intensidade da vibração, quando maior a intensidade mais forte é o som e vice versa. A intensidade existe de duas maneiras; · Intensidade Física ou Energética – Chamada de limiar de audibilidade, é a intensidade das ondas acústicas. · Intensidade Fisiológica ou Nível Sonoro – Grandeza física capaz de calcular a intensidade do som. A grandeza é medida em Bel cujo submúltiplo é o decibel. Altura: mesmo sem conhecer música, conseguimos diferenciar o som agudo (ou fino), do som grave (ou grosso), a altura serve para diferenciarmos os mesmos. A altura do som depende da freqüência, que é o número de vibrações por segundo. Quanto maior a freqüência mais aguda é o som e vice versa. Timbre: cada pessoa tem o seu timbre, não existem timbres iguais. Através do timbre podemos diferenciar o som de um instrumento, mesmo sem ver qual o instrumento está sendo utilizado. Isto é, o timbre é uma qualidade que nos permite compreender a diferença entre dois sons da mesma altura e intensidade. • Som fundamental: quando se percebe a presença de sons tocados numa mesma altura, porém por instrumentos diferentes. • Sons harmônicos: sons que completam o som fundamental formando o timbre. |
12> Conclusão Final: Com este trabalho, concluímos que dessa brincadeira de criança, nos faz entender muito mais a Física, os conceitos ondulatórios e acústicos. O telefone não serve apenas para “brincar”, serve também para nos ensinar. Os resultados poderiam ter sido melhores nos testes, e na primeira e segunda etapa da competição, mais a uma grande dificuldade nas frases. Porém ficamos em 3º lugar da sala, conseguindo passar para a próxima fase da competição, sendo entre salas. De acordo com os passos do item 3, é só montar o seu telefone e se diverti, aprendendo. |
Assinar:
Postagens (Atom)